- 1- Theoretische Grundlagen:
Die folgenden Abbildungen zeigen den physikalischen Aufbau eines DC-Motors. Der DC-Motor wandelt elektrische Energie in mechanische Bewegung um. Die DC-Spannungsquelle (Power supply) versorgt den Motor mit elektrischer Energie. Durch den fließenden Strom entsteht im Rotor ein Magnetfeld, das eine Lorentz-Kraft erzeugt (Rotation).
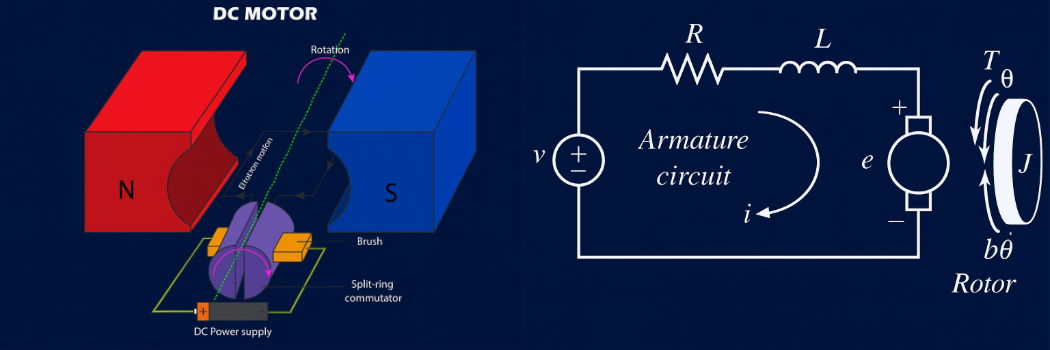
Diese Abbildungen lassen sich dann mit zwei Hauptgleichungen beschreiben:
- Elektrische Gleichung (2. Kirchhoffschen Gesetz / Faraday’schen Induktionsgleichung)
\[ V(t) = L \frac{di(t)}{dt} + R\,i(t) + K_e\,\omega(t) \]und da
\[ \omega(t) = \frac{d\theta(t)}{dt} \]Folgt daraus:
\[ L \frac{di(t)}{dt} = V(t) - R\,i(t) - K_e \frac{d\theta(t)}{dt} \]oder auch geschrieben als:
\[ L \frac{di}{dt} = V - (R\,i + K_e \frac{d\theta}{dt}) \]Diese Gleichung beschreibt den elektrischen Stromkreis der Motorwicklung.
- \( V(t) \): angelegte Spannung
- \( L \frac{di(t)}{dt} \): Induktionsspannung durch Stromänderung
- \( R\,i(t) \): Spannungsabfall am Wicklungswiderstand
- \( K_e \frac{d\theta(t)}{dt} \): Gegenspannung (Gegen-EMK), proportional zur Drehgeschwindigkeit
- \( \frac{d\theta(t)}{dt} \): Winkelgeschwindigkeit des Rotors (rad/s)
- Mechanische Gleichung: (2. Newtonschen Gesetz für Rotation)
\[ \sum M = J \frac{d\omega}{dt} \quad \Longleftrightarrow \quad J \frac{d\omega(t)}{dt} = K_t\,i(t) - b\,\omega(t) \]mit den Momenten:
\[ M = K_t\,i(t) - b\,\omega(t) \]und da
\[ \omega(t) = \frac{d\theta(t)}{dt} \]folgt daraus:
\[ J \frac{d^2\theta(t)}{dt^2} = K_t\,i(t) - b\,\frac{d\theta}{dt} \]oder auch geschrieben als:
\[ J \frac{d^2\theta}{dt^2} = K_t\,i - b\,\frac{d\theta(t)}{dt} \]Diese Gleichung beschreibt die Drehbewegung des Motors ohne äußere Last.
- \( J \): Trägheitsmoment des Rotors
- \( \frac{d\omega}{dt} \) oder \( \frac{d^2\theta}{dt^2} \): Winkelbeschleunigung
- \( \omega(t) = \frac{d\theta(t)}{dt} \): Winkelgeschwindigkeit
- \( b\,\omega(t) \): Reibungsverluste (viskose Dämpfung)
- \( K_t\,i(t) \): Elektromagnetisches Drehmoment (durch Lorentzkraft erzeugt)
- Reglerentwurf:
Ein PID-Regler wird zur Positionsregelung eingesetzt. Ziel ist es, den Positionsfehler
\[ e(t) = \theta_{ref}(t) - \theta(t) \]zu minimieren.
PID-Reglergleichung:
\[ u(t) = K_p\,e(t) + K_i \int e(t)\,dt + K_d\,\frac{de(t)}{dt} \]Die Parameter \( K_p \), \( K_i \) und \( K_d \) werden z. B. durch manuelles Tuning, die Ziegler–Nichols-Methode oder den Simulink Tuner bestimmt.
- 2- Matlab/Simulink-Modell:
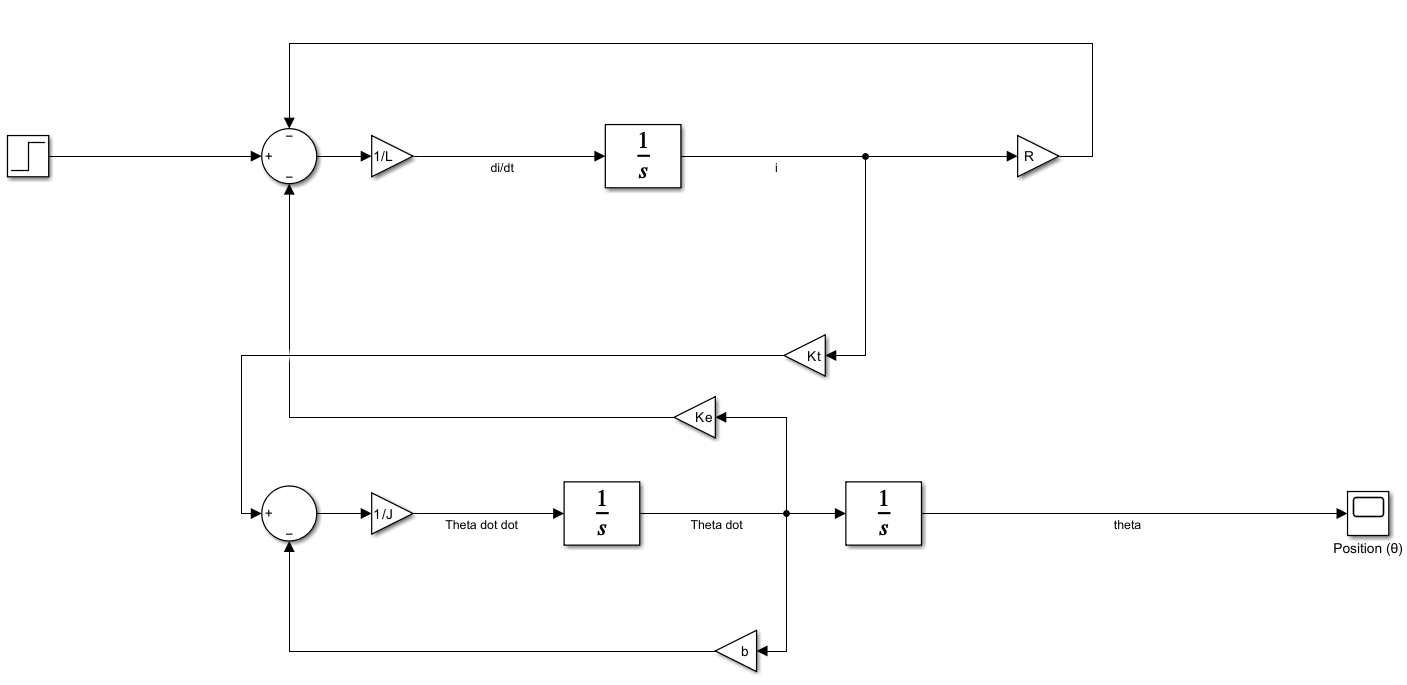
Bei der Erstellung wird die zwei folgenden Gleichungen verwendet:
\[ L \frac{di}{dt} = V - (R\,i + K_e \frac{d\theta}{dt}) \](1)
\[ J \frac{d^2\theta}{dt^2} = K_t\,i - b\,\frac{d\theta}{dt} \](2)
- Simulink-Modell des DC-Motors ohne Regler und Ergebnis der Positionsausgabe (θ)
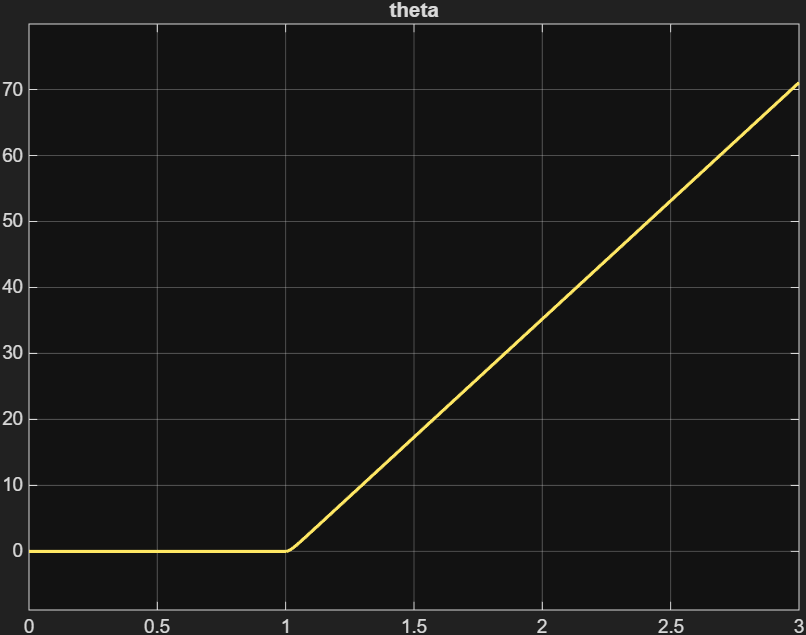
Das zweite Bild zeigt das Positionssignal θ(t) über die Zeit.
Beobachtungen:
- Die Kurve beginnt bei 0 (Motor steht still).
- Nach der Step-Eingabe (bei t ≈ 1 s) beginnt θ linear anzusteigen.
- Der Winkel wächst kontinuierlich — also keine Begrenzung, kein stationärer Zustand.
Das bedeutet:
- Der Motor dreht sich ständig weiter, solange eine Spannung anliegt.
- Es gibt keine Positionsregelung — der Motor erreicht also keinen festen Winkel, sondern läuft frei.
- Kein Ausgleich von Störungen oder Reibung.
Ein PID-Regler ist notwendig, um die Position (θ) gezielt zu steuern und stabil an einem Sollwert zu halten.
- Simulink-Modell des DC-Motors mit Regler und Ergebnis der Positionsausgabe (θ)
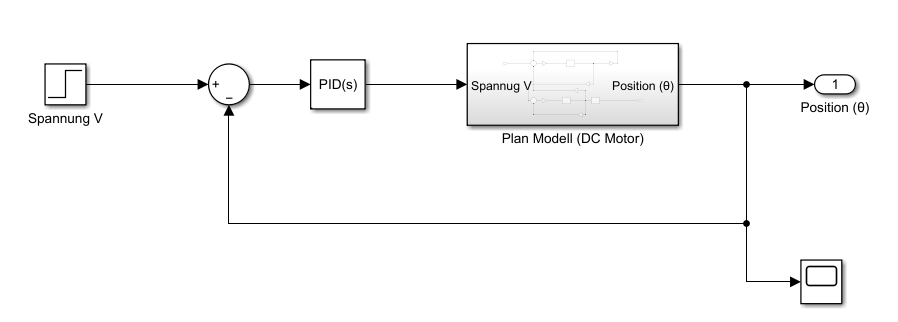
Die neue Simulink-Struktur (mit Regler) stellt einen geschlossenen Regelkreis (Closed-Loop Control) dar:
- Sollwert (Step-Signal):
Das ist der gewünschte Zielwert der Motorposition (\( \theta_{ref} = 1\,\text{rad} \)).
- Vergleichssumme (Summationsblock):
Berechnet den Positionsfehler \[ e(t) = \theta_{ref}(t) - \theta(t) \]
- PID-Reglerblock (PID(s)):
Berechnet das Stellsignal (Spannung \( v(t) \)) aus dem Fehler: \[ v(t) = K_p\,e(t) + K_i \int e(t)\,dt + K_d\,\frac{de(t)}{dt} \]
- DC-Motor-Modell (Plan-Modell):
Das System, das die Spannung in eine Rotationsbewegung (Position θ) umwandelt.
In diese erste Simulation wurde:
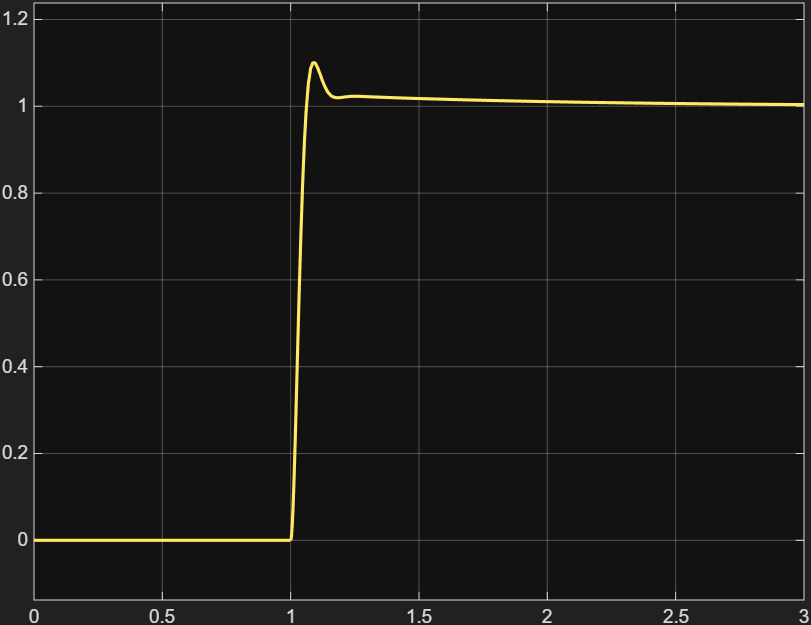
\[ K_p = 1, \quad K_i = 1, \quad K_d = 0 \]Beobachtungen:
- Bei t ≈ 1 s tritt der Sollsprung (Step) auf.
- Die Position steigt schnell auf den Zielwert (≈ 1).
- Es gibt ein kleines Überschwingen über 1 rad (~1.1–1.2).
- Danach pendelt sich θ(t) stabil auf 1 rad ein.
Interpretation – Vergleich mit dem offenen System
| Merkmal | Ohne PID-Regler | Mit PID-Regler (P = 1, I = 1) |
|---|---|---|
| Systemtyp | Offener Kreis | Geschlossener Regelkreis |
| Verhalten | θ steigt unbegrenzt an | θ erreicht Sollwert stabil |
| Stabilität | instabil (läuft weiter) | stabil (stationärer Zustand) |
| Fehler (steady-state) | unendlich groß | ≈ 0 |
| Überschwingen | – | leicht (~10–15 %) |
| Einschwingzeit | – | < 1.5 s |
Probleme im aktuellen System (P = 1, I = 1, D = 0)
Beim Blick auf Diagramm mit Regler erkennt man:
- Überschwingen (~10–20 %): Der Motor dreht leicht über den Zielwert (1 rad) hinaus.
- Kleines Nachschwingen: Das System braucht ein paar Sekunden, um sich einzupendeln.
- Langsames Ausklingen: Der Regler kompensiert den Fehler, reagiert aber etwas zu aggressiv.
Ursache:
Das Zusammenspiel von \( K_p = 1 \) und \( K_i = 1 \) führt zu einer recht hohen Integraldynamik. → Das heißt: Der I-Anteil sammelt den Fehler zu stark auf → zu viel Stellspannung, bevor das System reagiert → Überschwingen. Da kein D-Anteil vorhanden ist, fehlt hier die Dämpfung.
Experiment mit Kp = 1, Ki = 0.5, Kd = 0.05
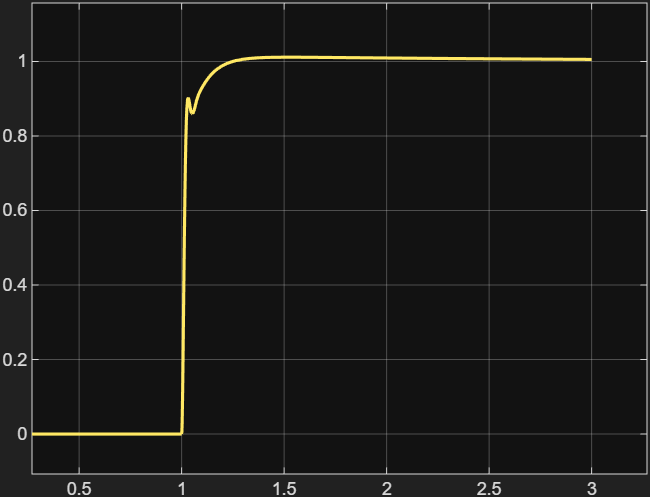
Beobachtung aus der Kurve
- Die Position steigt schnell auf den Sollwert (1 rad).
- Überschwingen ist nahezu eliminiert – nur eine sehr kleine Welle kurz nach t = 1 s.
- Das System erreicht den Sollwert sauber und bleibt stabil ohne Schwingung.
- Die Einschwingzeit ist kurz (ca. 1 s).
- Kein stationärer Fehler (\( \theta \rightarrow 1 \, \text{rad} \)).
Vergleich mit vorherigen Ergebnissen:
| Konfiguration | Verhalten | Bemerkung |
|---|---|---|
| Ohne PID | θ wächst unbegrenzt | Kein Feedback → instabil |
| PI-Regler (1, 1, 0) | Überschwingung, Nachschwingen | Zu aggressiv, übersteuert |
| PID-Regler (1, 0.5, 0.05) | Schnell, stabil, kein Überschwingen | Optimal abgestimmt |